Contents
% /home/dimarzio/Documents/working/12229/lectures/rc2students.m % Thu Oct 19 15:09:09 2017 % Revised Tue Oct 23 17:55:10 2018 % Chuck DiMarzio tmax=1024;t=[1:tmax]; % Time in units of dt
Periodic signals
A couple of simple functions to use
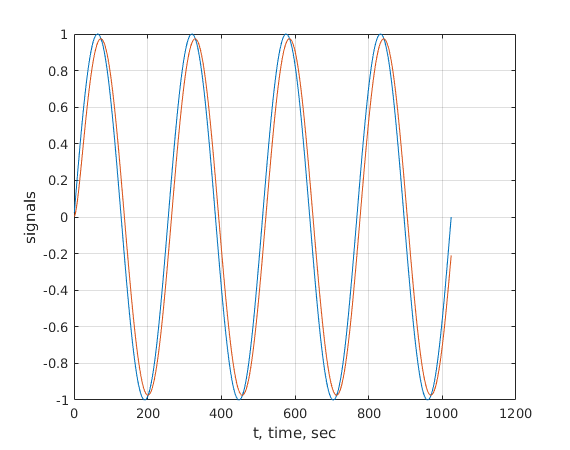
sine256=sin(2*pi*t/256); % period is 256 sec, f=(1/256) Hz square=double(sine256>0); % Easy way to make a square wave. a=0.1; % a = dt/(RC) figure;measurement=rcfilter(t,square,a); hold on; moose=axis; plot(moose(1:2),exp(-1)*[1,1],'k--'); plot(moose(1:2),(1-exp(-1))*[1,1],'k--'); hold off; figure;measurement=rcfilter(t,sine256,a);
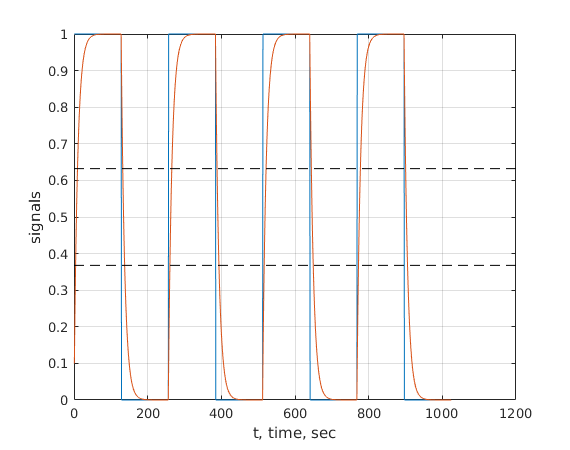
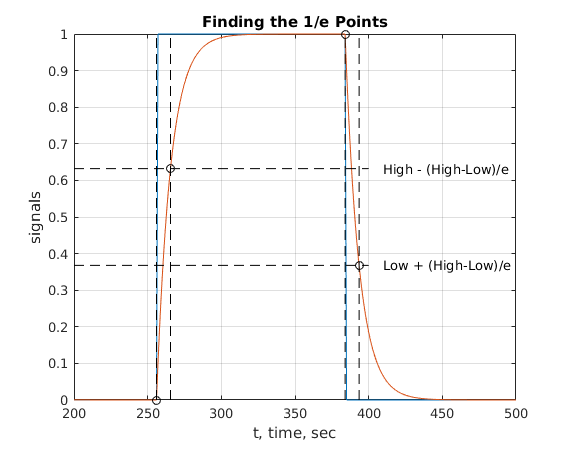
Measuring the time constant
figure;measurement=rcfilter(t,square,a); hold on; moose=axis;moose(1)=200;moose(2)=500;axis(moose); plot([moose(1),400],exp(-1)*[1,1],'k--'); plot([moose(1),400],(1-exp(-1))*[1,1],'k--'); plot(256*[1,1],moose(3:4),'k--');plot(256,0,'ko'); plot(265.5*[1,1],moose(3:4),'k--');plot(265.5,1-exp(-1),'ko'); plot(384*[1,1],moose(3:4),'k--');plot(384,1,'ko'); plot(393.5044*[1,1],moose(3:4),'k--');plot(393.5044,exp(-1),'ko'); text(410,exp(-1),'Low + (High-Low)/e'); text(410,1-exp(-1),'High - (High-Low)/e'); title('Finding the 1/e Points'); hold off;
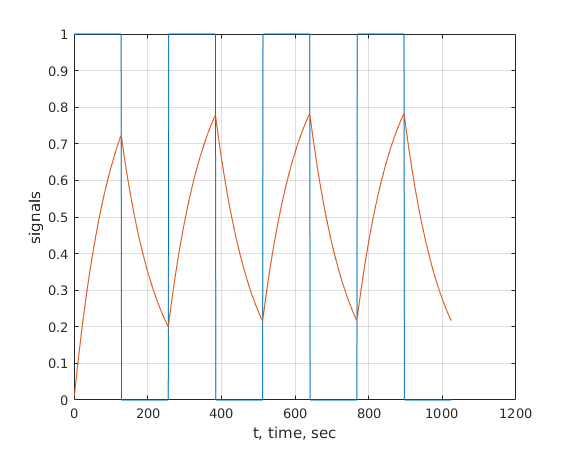
Try making a smaller and see what happens.
a=0.01; % a = dt/(RC)
figure;measurement=rcfilter(t,square,a);
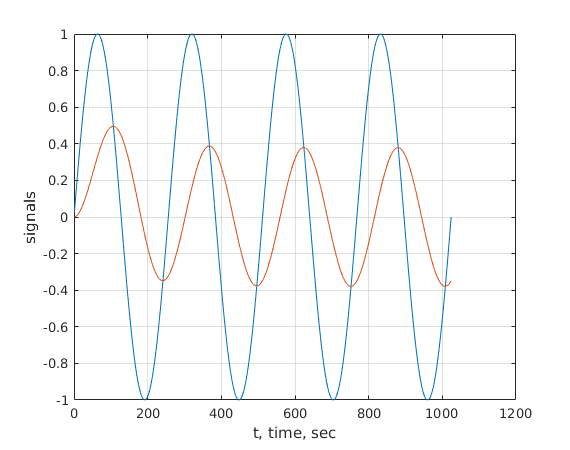
figure;measurement=rcfilter(t,sine256,a);
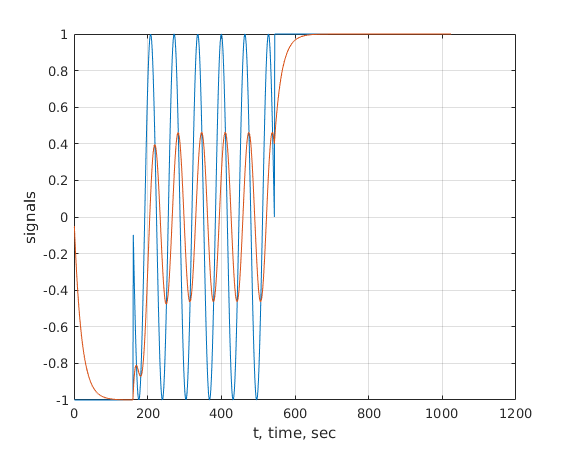
Burst periodic signal
a=0.05; % a = dt/(RC) wsine64=sin(2*pi*t/64); % period is 64 sec, f=(1/64) Hz wsine64([1:+128+32])=-1; wsine64([513+32:end])=1; figure;measurement=rcfilter(t,wsine64,a); % -------------------------------------------------------------------
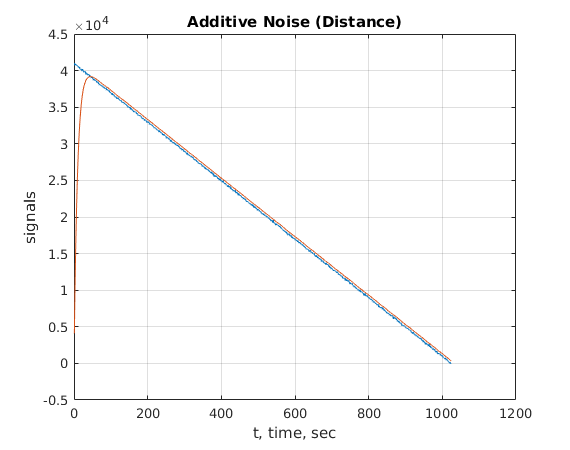
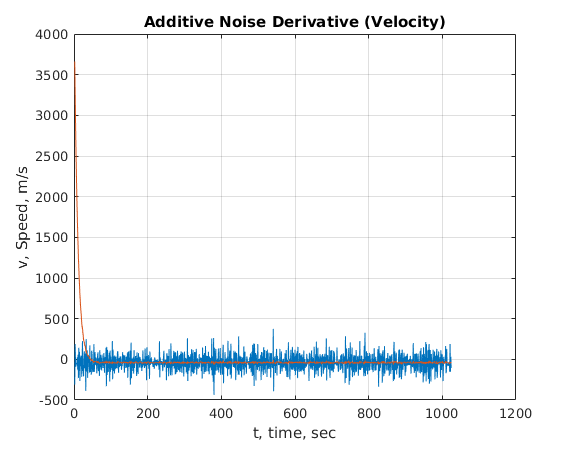
Radar signal
% I will explain the radar signal in class. In this case, the % object is coming toward the radar, arriving (distance=0) at time % tmax. a=0.1; % a = dt/(RC) speed=40;noisedist=80; % Simulated police radar signals; 40 meters % per second is kind of fast. distance1=speed*(max(t)-t); % Ideal signal distance2=distance1+noisedist*randn(size(t)); % Noisy signal ttest=double(rand(size(t))>0.99); % Noisy signal with dropouts distance3=distance2.*(1-ttest)+tmax*speed*rand(size(t)).*ttest; % Plot the noisy distance measurement and filtered one. figure;measurement=rcfilter(t,distance2,a); title('Additive Noise (Distance)'); % Range rate is distance difference divided by time difference figure;plot(t(2:end),distance2(2:end)-distance2(1:end-1),... t(2:end),measurement(2:end)-measurement(1:end-1));grid on; xlabel('t, time, sec');ylabel('v, Speed, m/s'); title('Additive Noise Derivative (Velocity)');
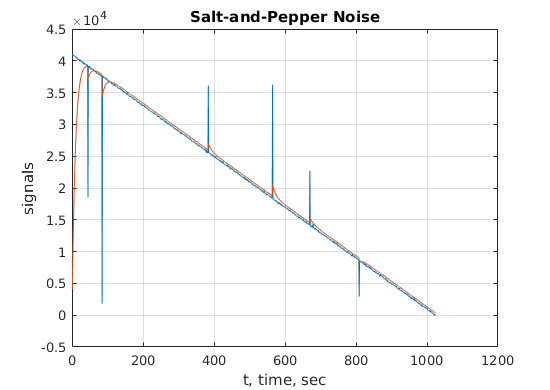
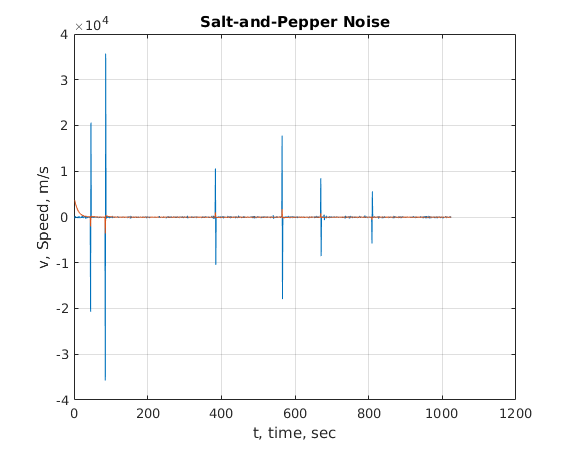
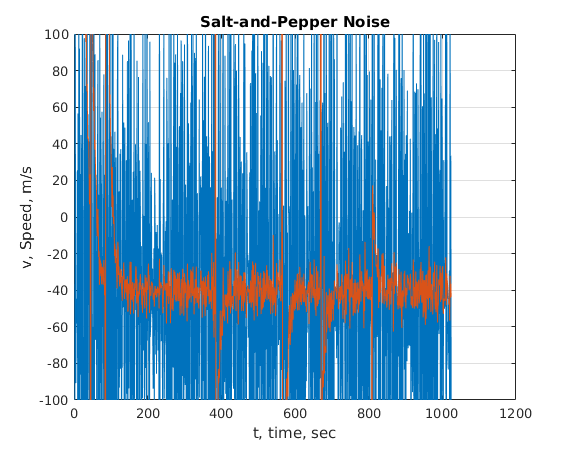
Salt and Pepper Noise (linear filters don't work very well)
figure;measurement=rcfilter(t,distance3,a); title('Salt-and-Pepper Noise'); figure;plot(t(2:end),distance3(2:end)-distance3(1:end-1),... t(2:end),measurement(2:end)-measurement(1:end-1));grid on; xlabel('t, time, sec');ylabel('v, Speed, m/s'); title('Salt-and-Pepper Noise'); % Fix the speed scale to show reasonable values figure;plot(t(2:end),distance3(2:end)-distance3(1:end-1),... t(2:end),measurement(2:end)-measurement(1:end-1));grid on; xlabel('t, time, sec');ylabel('v, Speed, m/s'); moose=axis;axis([moose(1:2),-100,100]); title('Salt-and-Pepper Noise'); % Try different filters (ie. change a). A long time constant % provides a smoother distance curve which gives better velocity % measurements, but will take longer to respond to changes in % speed.